
Thomas Jantos
PostDoc · Control of Networked Systems · University of Klagenfurt
I am a PostDoc researcher at the Control of Networked Systems group at the University of Klagenfurt. My research focuses on computer vision, deep learning, and AI-based state estimation for mobile robotics. I develop methods for 6D object pose estimation, object-relative navigation, and uncertainty quantification for autonomous systems such as UAVs.
Research Interests
Publications
2026
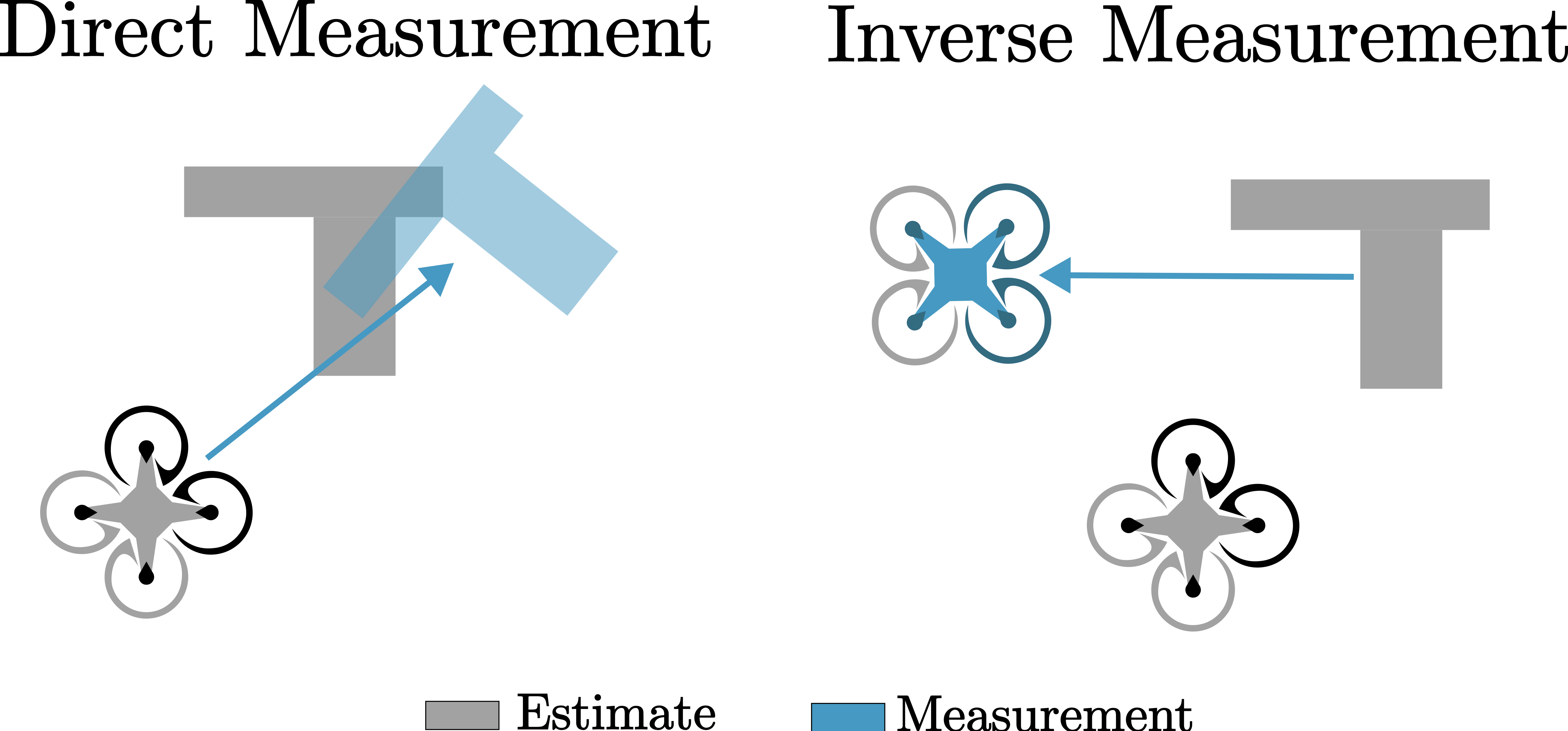
Reformulating AI-based Multi-Object Relative State Estimation for Aleatoric Uncertainty-based Outlier Rejection of Partial Measurements
arXiv Preprint, 2026
This paper presents the benefits of reformulating the measurement equation in AI-based, object-relative state estimation. By deriving an EKF using the direct object-relative pose measurement, we can decouple the position and rotation measurements, thus limiting the influence of erroneous rotation measurements and allowing partial measurement rejection based on aleatoric uncertainty.
2025
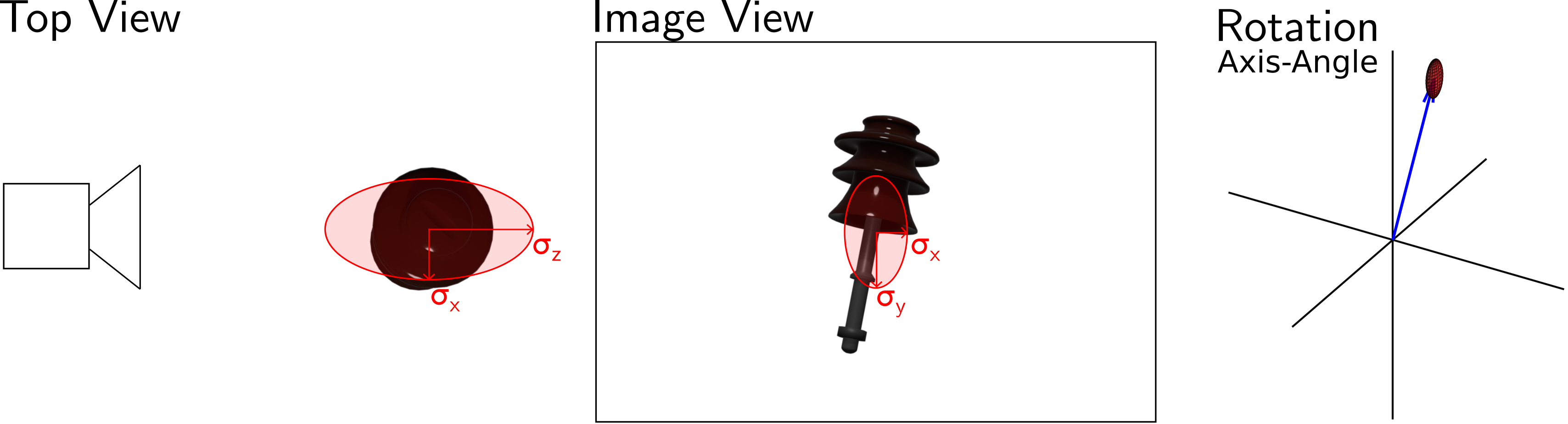
Aleatoric Uncertainty from AI-based 6D Object Pose Predictors for Object-relative State Estimation
IEEE Robotics and Automation Letters (RA-L), 2025
Deep Learning has become essential in various robotics applications due to excelling at processing raw sensory data to extract task-specific information from semantic objects. This work shows that any existing DL-based object-relative pose predictor can be extended for aleatoric uncertainty inference by including two multi-layer perceptrons, and demonstrates how these uncertainties improve object-relative state estimation.
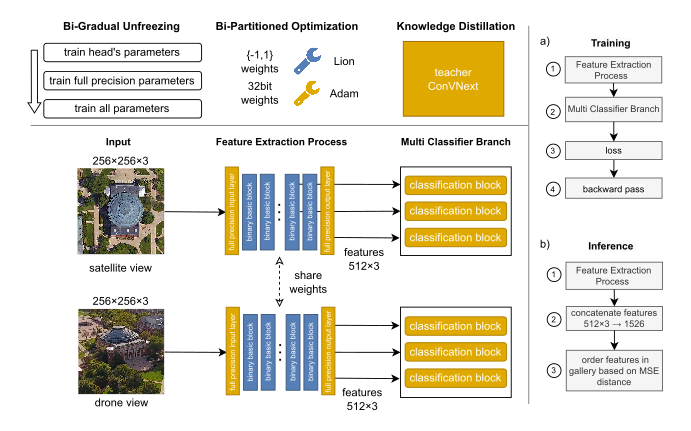
BiCrossNet: Resource-efficient Cross-view Geolocalization with Binary Neural Networks
Machine Learning: Science and Technology, 2025
This paper presents BiCrossNet, a novel approach to cross-view geolocalization utilizing binary neural networks to significantly reduce computational complexity while maintaining competitive performance. Key contributions include a Bi-Gradual Unfreezing method, a Bi-Partitioned Optimization strategy, and logit-based knowledge distillation.
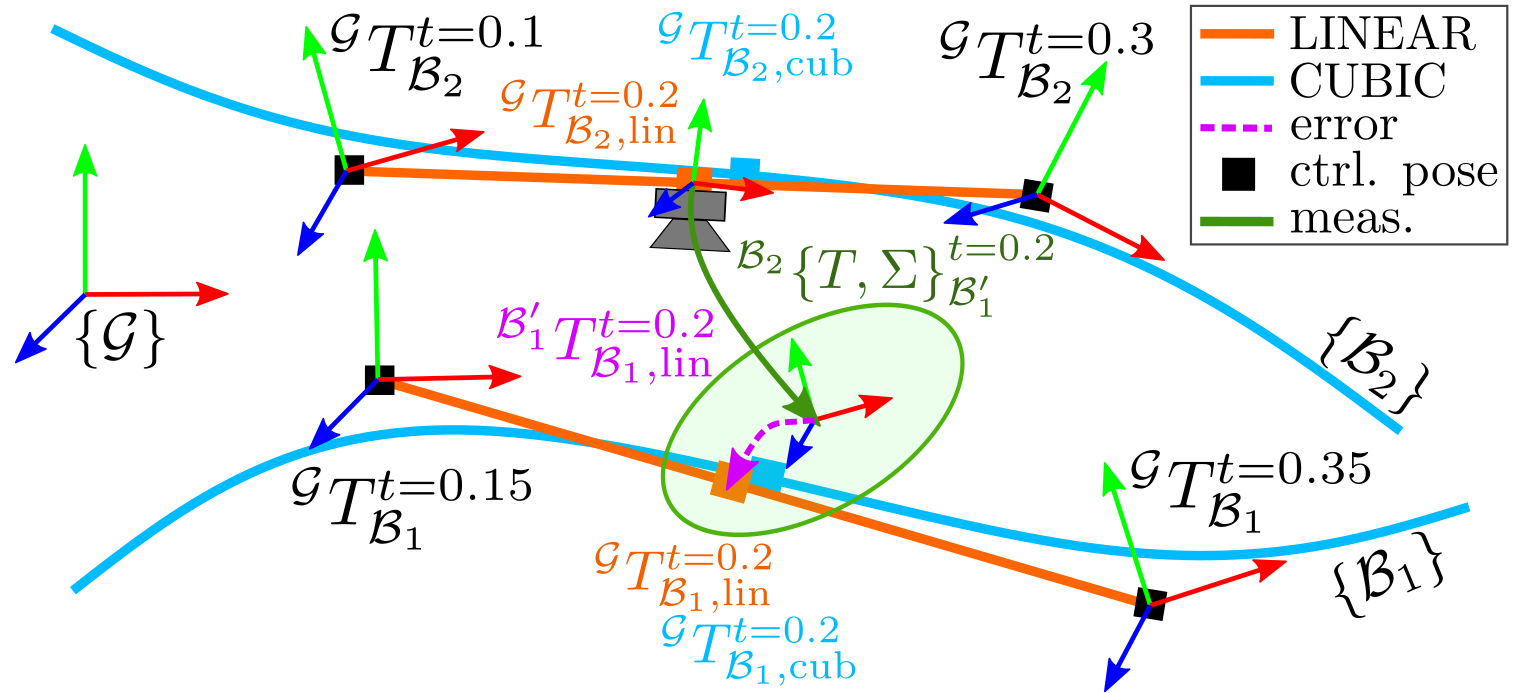
A Framework for the Consistency Analysis of Relative Pose Sensors for Unmanned Aerial Vehicles (UAVs)
Conference Paper, 2025
This work presents a framework for analyzing the consistency of relative pose sensors used in unmanned aerial vehicle applications, providing tools to evaluate and compare different sensor modalities for robust UAV navigation.
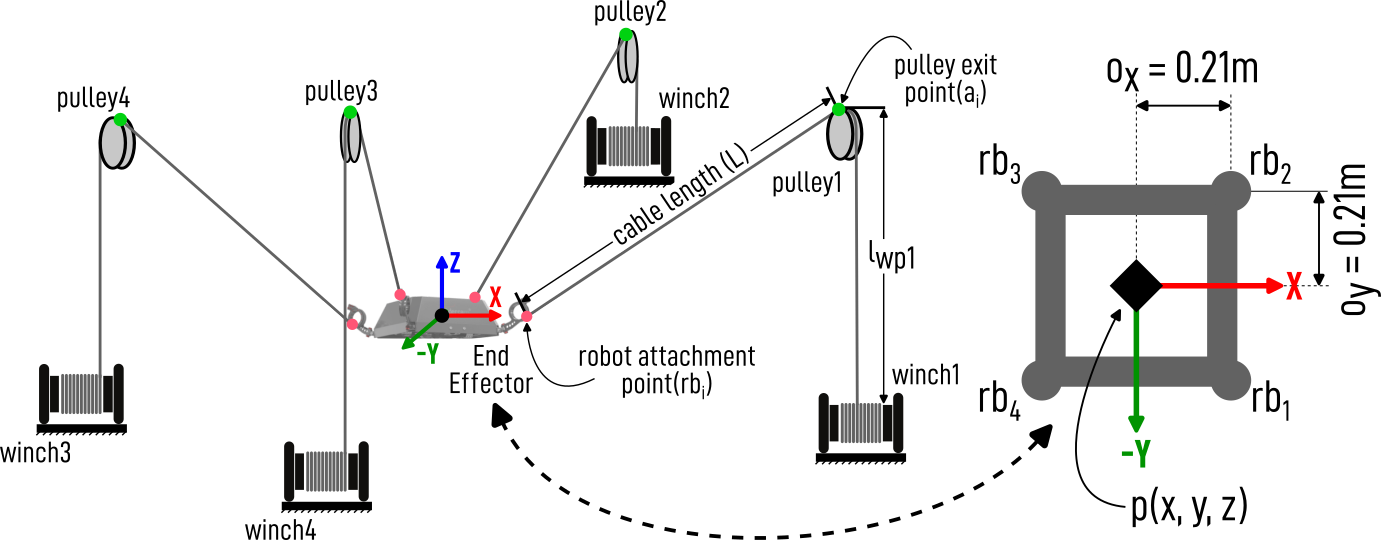
CaRoSaC: A Reinforcement Learning-Based Kinematic Control of Cable-Driven Parallel Robots by Addressing Cable Sag Through Simulation
IEEE Robotics and Automation Letters (RA-L), Vol. 10, No. 6, 2025
This paper introduces the Cable Robot Simulation and Control (CaRoSaC) Framework, which integrates a realistic simulation environment with a model-free reinforcement learning control methodology for suspended Cable-Driven Parallel Robots (CDPRs), accounting for the effects of cable sag.
2024
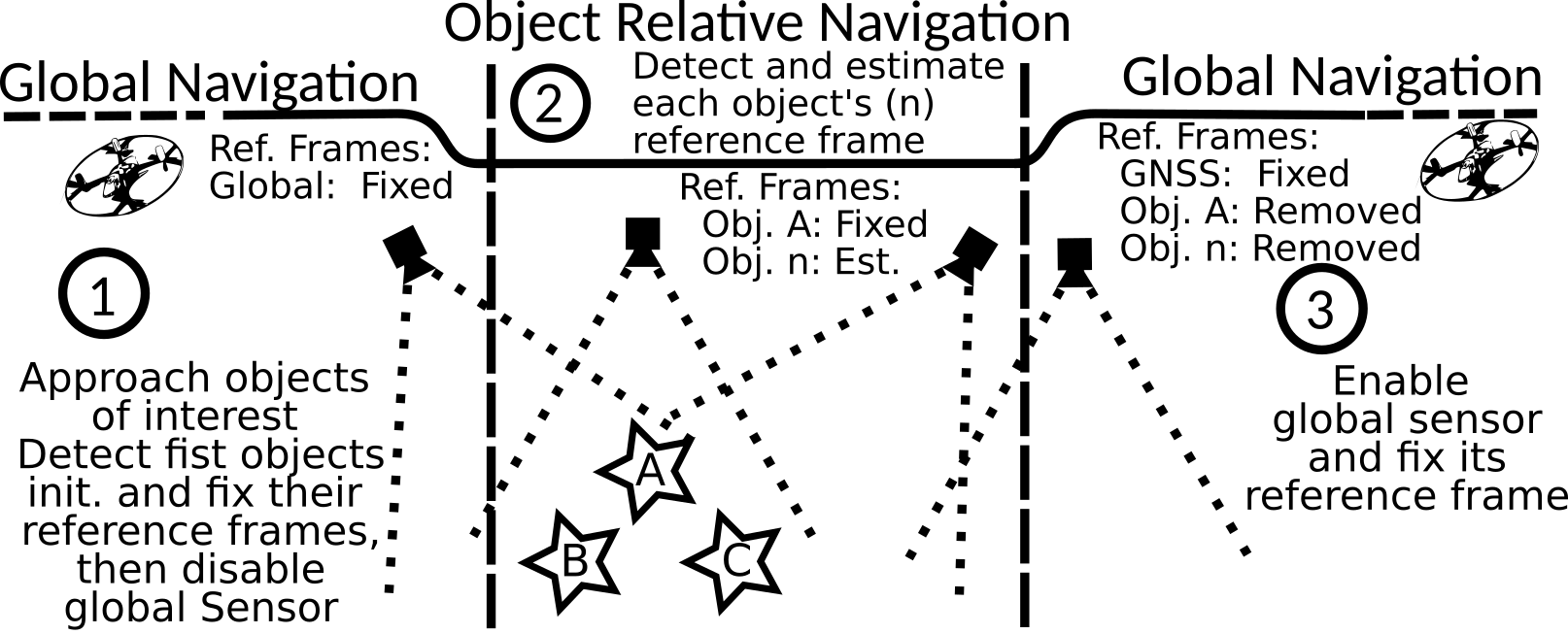
AIVIO: Closed-loop, Object-relative Navigation of UAVs with AI-aided Visual Inertial Odometry
IEEE Robotics and Automation Letters (RA-L), Vol. 9, No. 12, 2024
Object-relative mobile robot navigation is essential for a variety of tasks, e.g. autonomous critical infrastructure inspection, but requires the capability to extract semantic information about the objects of interest from raw sensory data. This letter presents a real-time capable UAV system for object-relative, closed-loop navigation with a minimal sensor configuration consisting of an IMU and RGB camera.
2023
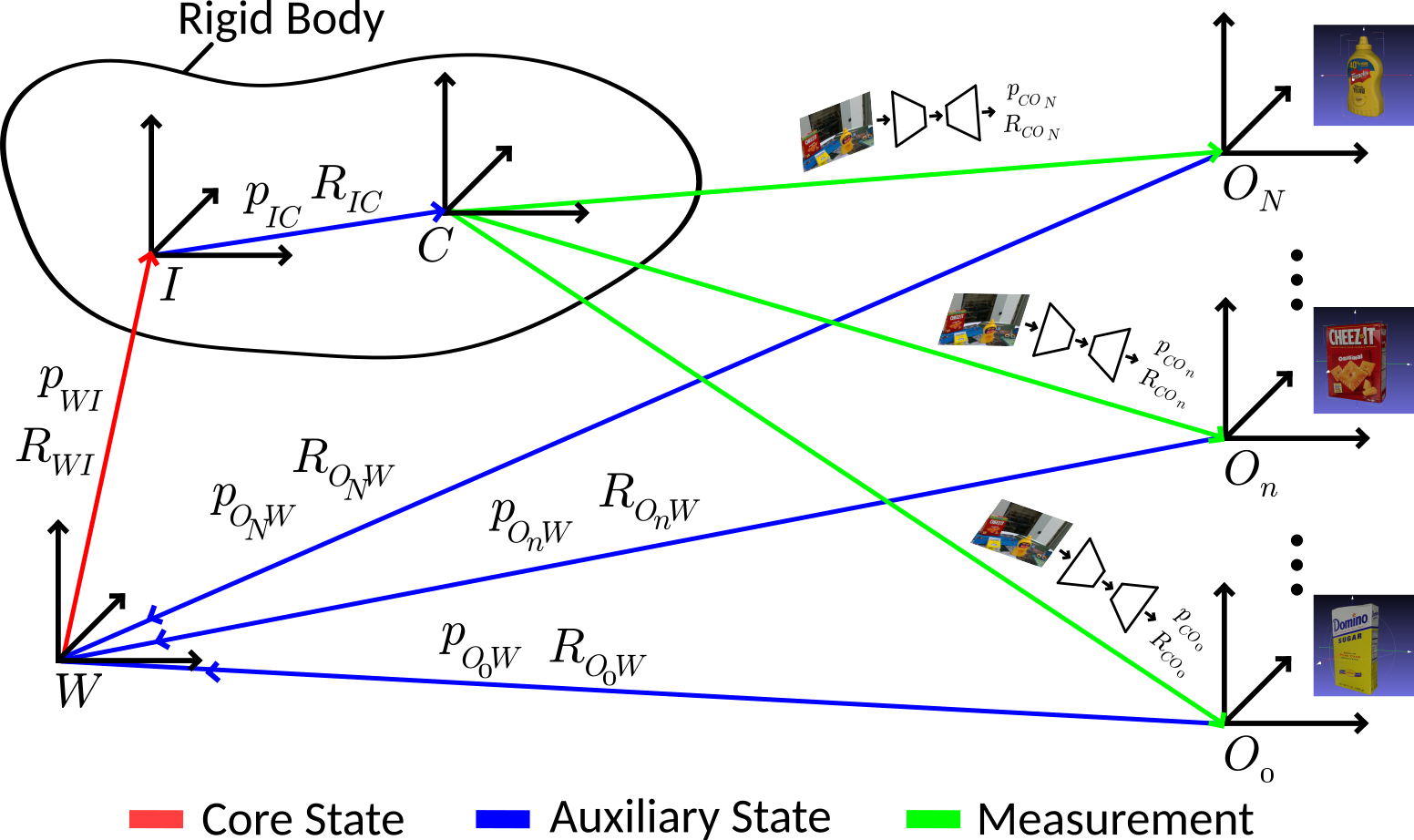
AI-Based Multi-Object Relative State Estimation with Self-Calibration Capabilities
IEEE International Conference on Robotics and Automation (ICRA), London, 2023
The capability to extract task-specific, semantic information from raw sensory data is a crucial requirement for many applications of mobile robotics. This paper proposes a method combining a state-of-the-art AI-based pose estimator for objects in camera images with data from an IMU for 6-DoF multi-object relative state estimation of a mobile robot with self-calibration capabilities.

PoET: Pose Estimation Transformer for Single-View, Multi-Object 6D Pose Estimation
Conference on Robot Learning (CoRL), PMLR Vol. 205, 2023
Accurate 6D object pose estimation is an important task for a variety of robotic applications such as grasping or localization. We present a transformer-based approach that takes an RGB image as input and predicts a 6D pose for each object in the image. Besides the image, our network does not require any additional information such as depth maps or 3D object models.
2022
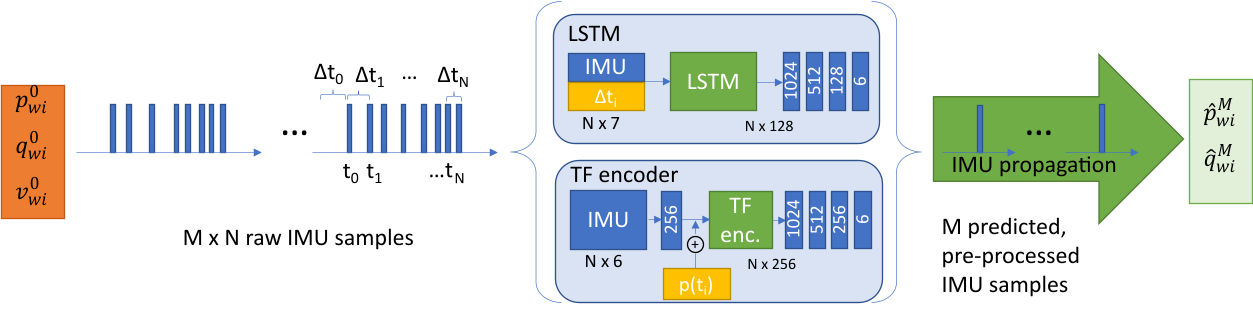
Improved State Propagation through AI-based Pre-processing and Down-sampling of High-Speed Inertial Data
IEEE International Conference on Robotics and Automation (ICRA), 2022
We present a novel approach to improve 6 degree-of-freedom state propagation for unmanned aerial vehicles in a classical filter through pre-processing of high-speed inertial data with AI algorithms. We evaluate both an LSTM-based approach as well as a Transformer encoder architecture. Both algorithms take as input short sequences of high-rate inertial data and are trained to predict pre-processed IMU samples that minimize the state propagation error. The results indicate that the LSTM-based architecture outperforms the Transformer encoder and significantly improves the propagation error even for long IMU propagation times.
2021
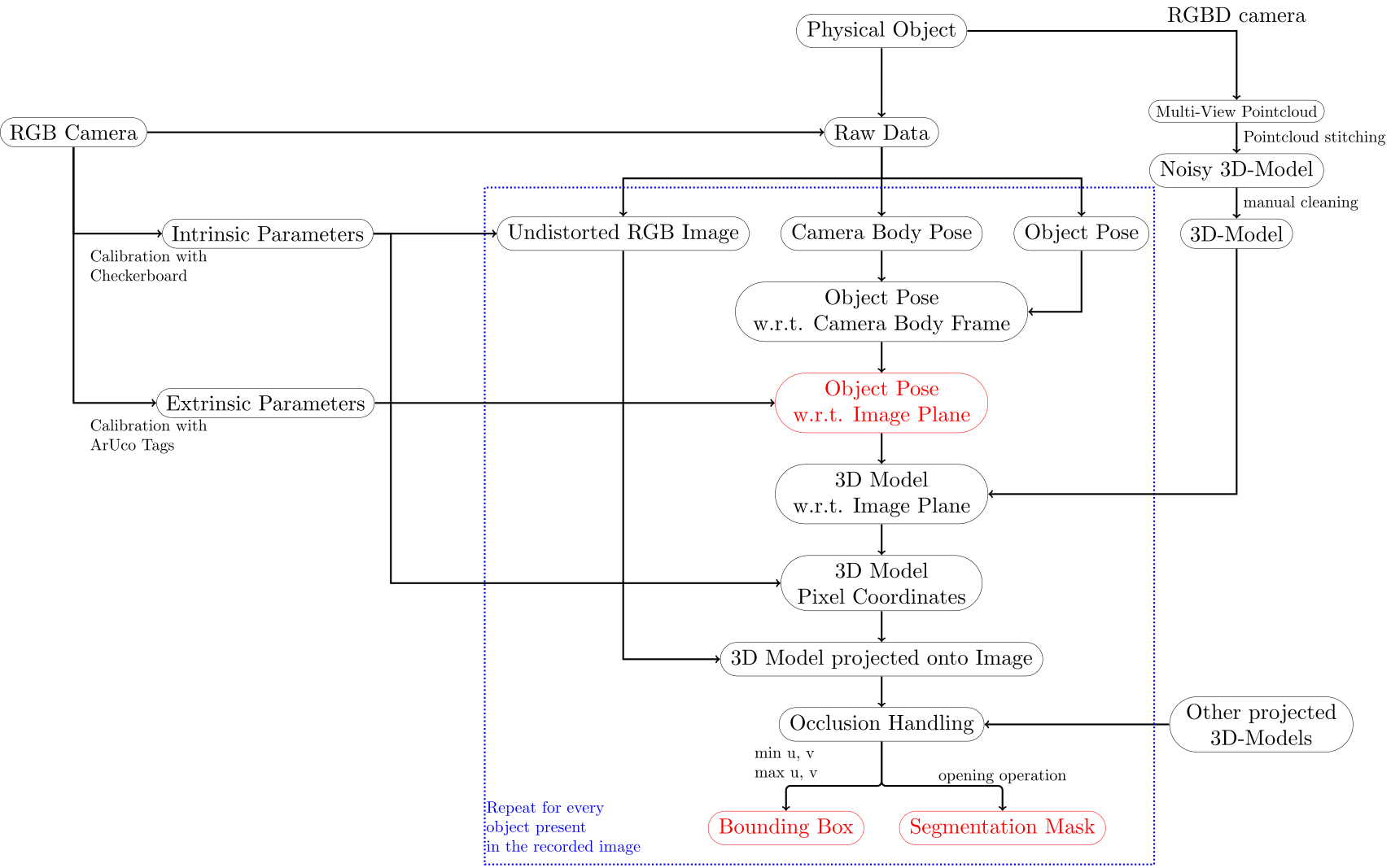
Automated Data Annotation for 6-DoF AI-Based Navigation Algorithm Development
Journal of Imaging, Vol. 7, No. 11, 2021
Accurately estimating the six degree of freedom (6-DoF) pose of objects in images is essential for a variety of applications such as robotics, autonomous driving, and vision-based navigation for unmanned aircraft systems. This work presents a novel approach that automates the data acquisition and annotation process, minimizing the annotation effort to the duration of the recording.